Introducción
La geometría diferencial no comenzó tratando espacios abstractos sino una familia particular de objetos hoy llamados subvariedades. Son el tipo de objetos con los que interactuamos cotidaneamente: superficies, curvas, cuerpos sólidos. Todos estos son subconjuntos de un espacio que asumimos planos, es decir $\mathbb{R}^3$. Sin embargo no todos los subconjuntos de $\mathbb{R}^3$ son lo suficientemente decentes como para poder ser analizables con cálculo. La propiedad que separa las subvariedades de los demás subconjuntos es el hecho de poseer planos (o lineas) tangentes. Esto asegura que la superficie (o curva) es suficientemente suave como para poder describirla correctamente con funciones diferenciables.
Subvariedades Inmersas
Recordemos que
Las parametrizaciones pueden ser utilizadas para describir el subconjunto $\varphi(U)$ con la ayuda de $k$-parámetros. Sin embargo algunas parametrizaciones sufren de “singularidades” o puntos donde la diferencial es singular. Esto puede introducir esquinas o aberraciones más graves en la forma que los parámetros describen al conjunto $\varphi(U)$.
Para evitar este comportamiento basta con pedir que la diferencial tenga rango máximo. En este caso, si $k < n$, el teorema de la inmersión nos dice que, salvo cambios de coordenadas en el codominio, la parametrización es identica a meter un pedazo de plano $k$-dimensional en $\mathbb{R}^n$. Y, dado que los cambios de coordenada son diferenciables, dicho pedazo, visto en las coordenadas normales, es “suave” y similar a un plano (al verlo de cerca).
Las superficies, o en general las subvariedades, son subespacios que son descriptibles con parametrizaciones
Notemos que la definición de subvariedad inmersa no exige que las parametrizaciones sean inyectivas. Una curva que se autointersecta, pero que siempre tiene vector tangente no nulo, es una subvariedad de dimensión uno.
Otro ejemplo un poco más extraño lo brinda la botella de klein
que se autointersecta en un círculo. Cerca de los puntos de autointersección la superficie se ve como dos planos intersectandose en una linea.
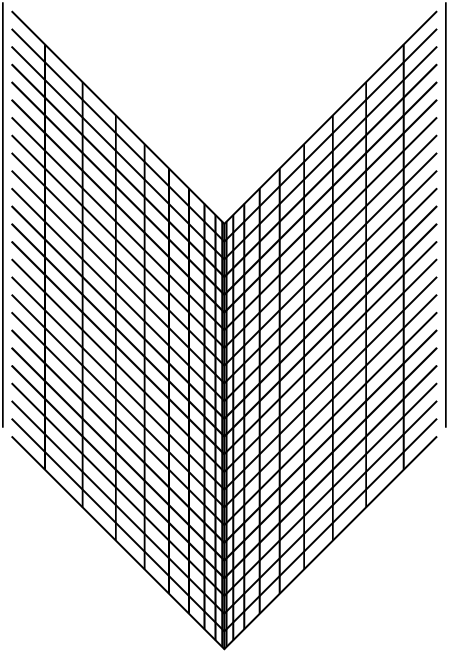
Otra posibilidad sería como en la siguiente figura
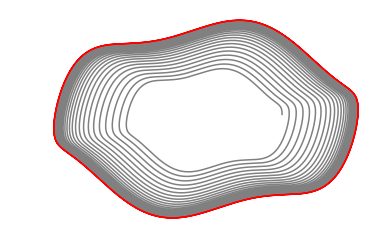
que está formada por una curva que se enrolla hasta una curva límite y la curva límite. Tanto la espiral como la curva límite se pueden describir como imagenes de inmersiones de $\mathbb{R}^1$ en $\mathbb{R}^2$. Si se enfocan en un punto en la espiral, basta con acercarse lo suficiente para que el conjunto parezca una linea cruzando el plano. Sin embargo esto deja de ser cierto en los puntos sobre la curva límite. En dichos puntos, no importa que tanto se acerce uno siempre seguirán apareciendo una cantidad infinita de lineas que se aproximan al punto.
Recordemos que si $X$ es un espacio topológico y $A \subset X$ es un subconjunto, entonces $A$ hereda una topología de $X$ en la cual los abiertos de $A$ son del tipo $U \cap A$, con $U$ abierto de $X$. Esta es llamada la topología de subespacio. Si a una subvariedad inmersa le damos la topología de subespacio que hereda de $\mathbb{R}^n$ entonces hemos visto un par de ejemplos en los cuales existen puntos con vecindades del tipo:
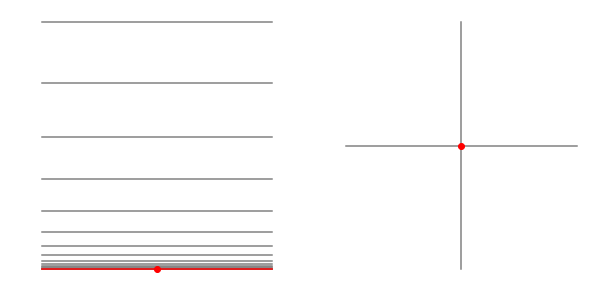
Estas vecindades no son ni siquiera homeomorfas a abiertos de $\mathbb{R}^n$ por lo que, en general, las subvariedades inmersas no son variedades. Al menos si uno usa la topología de subespacio. Entonces, ¿por qué reciben ese nombre?
Aunque la definición de la propiedad de inmersión depende de el uso de representaciones coordenadas específicas es posible ver que no depende de la representación elegida.
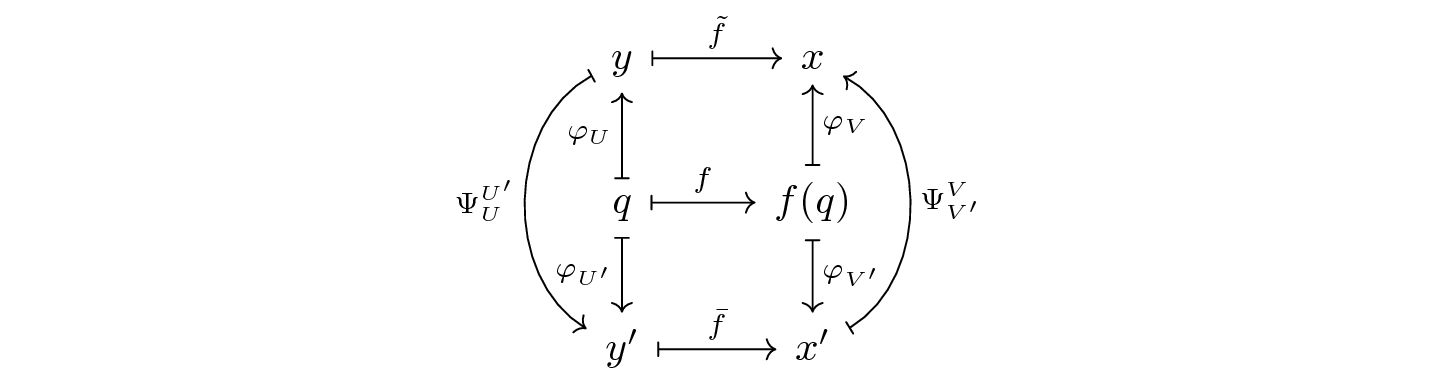 Dado que los cambios de coordenadas son difeomorfismos en particular
sus diferenciales son inyectivas en todo punto, y por la regla de la cadena
$$
D \tilde f_y = D(\Psi_{V'}^V)_{x'} \circ D\bar f_{y'} \circ D(\Psi_{U}^{U'})_{y}
$$
Así $D \tilde f_y$ es una composición de transformaciones lineales inyectivas y por lo tanto inyectiva ella misma.
Dado que los cambios de coordenadas son difeomorfismos en particular
sus diferenciales son inyectivas en todo punto, y por la regla de la cadena
$$
D \tilde f_y = D(\Psi_{V'}^V)_{x'} \circ D\bar f_{y'} \circ D(\Psi_{U}^{U'})_{y}
$$
Así $D \tilde f_y$ es una composición de transformaciones lineales inyectivas y por lo tanto inyectiva ella misma.
Más adelante daremos una descripcióń de inmersión que no depende del uso de coordenadas, pero será hasta que desarrollemos el lenguaje de los vectores tangentes.
Resulta que toda subvariedad inmersa de $\mathbb{R}^n$ es realmente la imagen de una inmersión $f: N \rightarrow \mathbb{R}^n$. Luego podemos extender la definición de subvariedad inmersa de $\mathbb{R}^n$ a cualquier variedad.
Lo que mencionamos anteriormente se puede resumir en lo siguiente: Si $f: N \rightarrow \mathbb{R}^n$ es una inmersión entonces $f(N)$ como subespacio de $\mathbb{R}^n$ puede no tener la misma topología que $N$. Para esto presentamos el concepto de encaje
Subvariedades encajadas
Podríamos definir subvariedad encajada usando la definición anterior:
Un subconjunto $A \subset M$ es una subvariedad encajada si existe una variedad $N$ junto con un encaje e inmersión $f: N \rightarrow M$ tal que $A = f(N)$. Sin embargo esta definición es un tanto impráctica al momento de demostrar que algo es una subvariedad encajada. Es por esto que damos la definición alternativa
La siguiente imagen representa el cambio de coordenadas del que habla la definición anterior:
Demostrar que la definición que se acaba de dar es lo mismo que la definición que mencionamos previamente requiere un poco de trabajo y se los dejamos como proyecto para este parcial.
Uno de los métodos más útiles para producir nuevas variedades, o demostrar que cierto subconjunto es una subvariedad encajada, es a través de las sumersiones.
De nuevo esta definición no depende de la representación coordenada elegida
Las sumersiones tienen representaciones locales sencillas, salvo cambio de coordenadas son proyecciones, por lo que los conjuntos de nivel parecen, al menos localmente, subespacios de $\mathbb{R}^n$. Esto es justo la definición de subvariedad encajada: